
AMP is designed to fully automatically control a fleet of drones and allows extension of the mission time/area of the entire fleet. Electric drones suffer from short flight times, but our solution solves that issue. The system is designed for infrastructure monitoring, perimeter/area monitoring, lightweight package delivery. We are using containers as modules for the entire solution. Each container is a module that allows the drone to be serviced in a given way (many drones at a time). The entire set can be changed according to the client’s needs. AMP uses a robotic arm that allows the system to replace payload and a smart docking platform for charging. The system checks the drone’s mission capability. If the drone is unable to continue the mission the system puts it in a holding area.
R&D
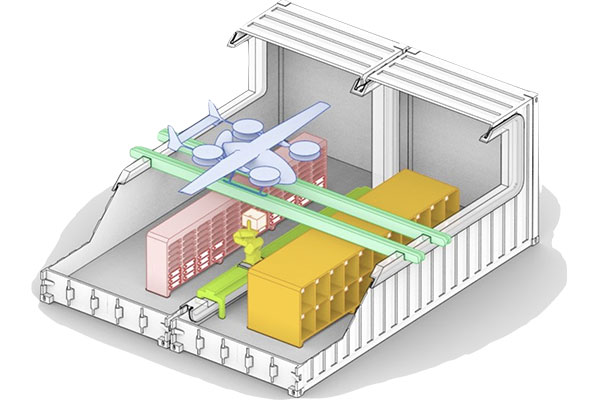
Automatic Maintenance Platform (AMP)
read more
Highway patrolling system (Grim Reaper)
read more
Agro Detectors
read more
Automatic Maintenance Platform (AMP)
Highway patrolling system (Grim Reaper)
We are building a “drone-based” highway patrolling solution to be used by Police to ensure highway traffic security. The system allows cars speed measurement, the distance between cars measurement, overheated cars detection, collection of evidence of traffic offenses for the Police use. The system is used by a drone operator (dedicated Police Officer). Drone flies next to the highway and records the traffic. Using cutting-edge cameras the system creates footage and based on deep learning algorithms estimates speed, the distance between vehicles. Data is securely transmitted directly to the Police system for further processing.
Moreover, the system uses thermal-imaging analysis to detect if a particular vehicle is overheating (for example overheated tires/brakes or a given vehicle is in fact on fire).
Agro Detectors
We are building drone-based agro sensors capable of low crop humidity detection, crop infestation detection, weed detection and fast evaluation (predictive) of the effect of the stimulus upon the plant. By using big data technologies with Deep Learning capabilities we can create a system that ensures herbicide spraying is only conducted where it is needed. While flying a drone is building a virtual map using camera and laser. In this way we measure response from the field. This response is letting us know if the field’s humidity is correct or if it is infested with pests/weeds.